 Skip to content
Skip to content Pin ESP32
The ESP32 had depening on the type 30 or 38 pins, I would recommand to go for the 38 pin version.
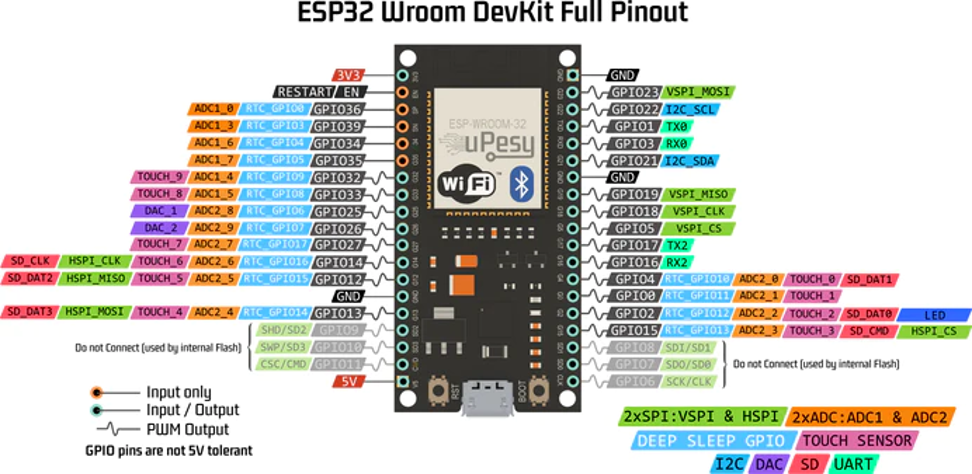
Not all the pins are the sim, you should check if it is a output or input pin is. for example an input only pin can not be connected to the stepper driver, because it can onle recievie signals, these pins can only be connected to the limit switch.
Motor pins
At the moment the software only support stepper motors. choocse the right pin for the PUL/STEP pin and the DIR pin.
The enable pin is not yet available.
Switch pins
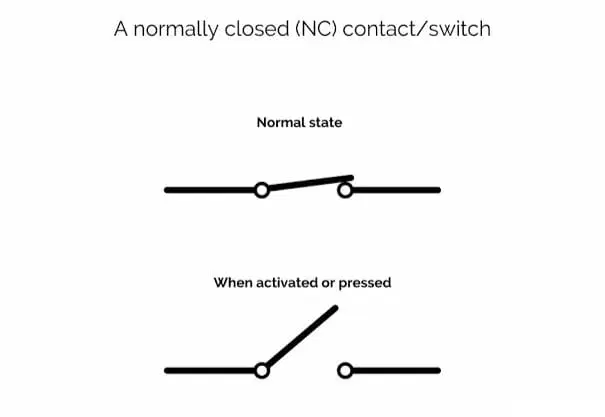
Choose the right pins for the limit switches, make sure the limit switches are normally closed
Tool pin
You can fill in 5 different Tool pins. For example “Tool pin 1” is a servo, and “Tool pin 2″is used for a relay. This relay could be connected to a magnet or vacuum pump. You can choose the right Tool pin for you specific tool in the tool settings.
IO Checkbox: Next to the Tool pin title there is a checkbox IO. When unchecked the tool pins are located at the same ESP32 as the robot pins. When checked it means that you are using a seperate ESP32 for the toolpin. This could be usefull if you are using multiple tool pins, because the esp 32 has a limited amount of pins.
IO pin
You can add 10 different IO pins to the software.
IO Checkbox: Next to the IO pin title there is a checkbox IO. When unchecked the io pins are located at the same ESP32 as the robot pins. When checked it means that you are using a seperate ESP32 for the io pin. This could be usefull if you are using multiple tool pins, because the esp 32 has a limited amount of pins.
