 Skip to content
Skip to content Camera settings
It’s possible to connect a camera to the tool, so that the camera move with the robot. This allows the robot to have a bigger search area, than when the camera is standing on a fixed position.
To make sure the software is porccesing the data from the camera correctly it is important to use the right settings. In the tool section of the settings you will find the following settings, that are used to setup the camera:
- XYZ: these are the offset
- Rotation offset
- small square anf big square
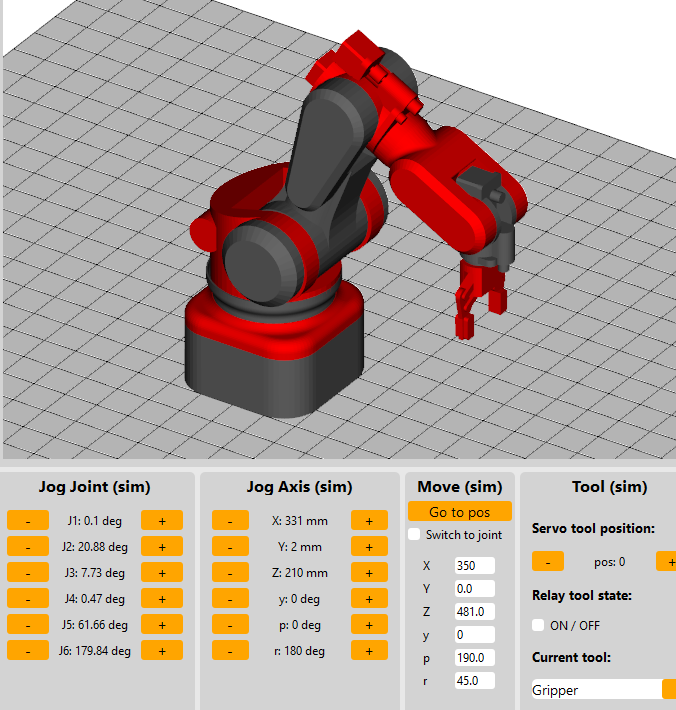
Step 1: set the robot in the right orientation, at this momet the vision library is not using taking the rotation of the robot in consideration when calculation the position. It is important to set y (yaw), p (pitch) and roll to always the same, when using the search function.
use for example the following position for the y,p,r axis: y = 0, p = 0, r = 180.
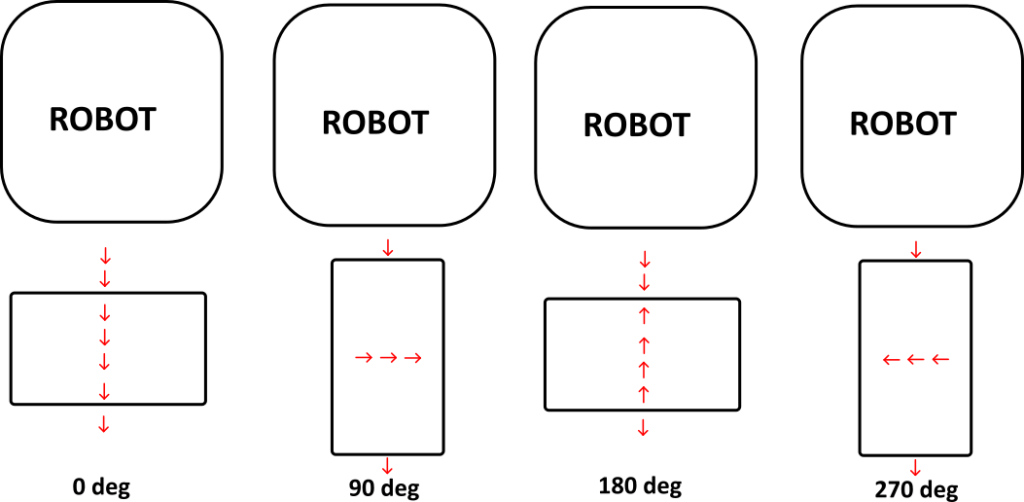
Step 2: determine the right angle, off the camera in the position from step 1.
Step 3: Calibrate the height of the camera
