 Skip to content
Skip to content Setup a MiKo robot
You have completed the build of your robot, and now it’s time to bring it to life. In this guide, I will walk you through the steps to set up your robot. This guide assumes that you have already installed MiKoBots Studio and uploaded the firmware to the robot.
Download robot profile
Even though the software includes default robot profiles like MiKo-1, MiKo-1 IO, and MiKo-mini, it’s recommended to download the latest robot profile from our website. You can find it here: https://mikobots.com/mikobots-studio/robots/. Download the ZIP file and you can either leave it in the Downloads folder or move it to your preferred location.
Delete the current robot profile

Import new robot profile
Connect the robot to MiKoBots Studio
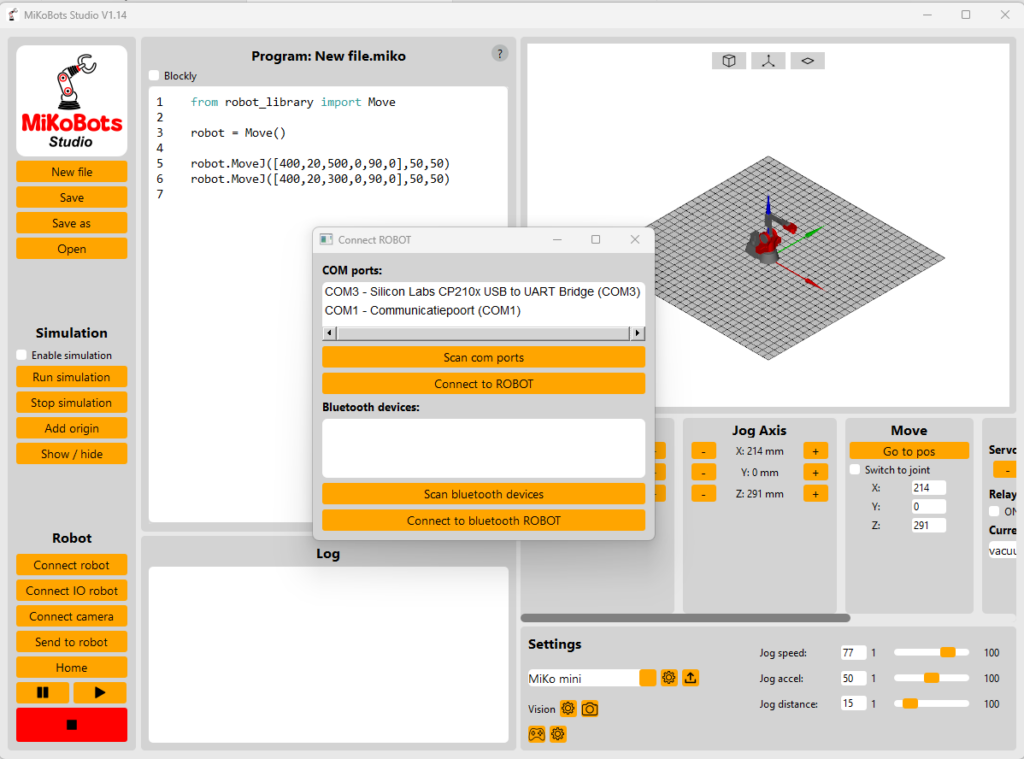
Now you’re ready to connect the robot to the software. Close the robot settings window if it’s still open. First, make sure you’ve selected the correct robot you want to connect to. Then, click on “Connect robot” on the left side of the screen. A window will open with options to connect via Bluetooth or COM port. Click on “Scan COM ports” to see all available COM ports. Select the COM port for the robot and click “Connect to robot.” The robot will begin connecting and sending settings. Once connected successfully, the button will turn green.
Check the movement of the joints
Once the robot is connected, it’s time to check if all the joints are working properly. Use the Jog joint buttons for this, but first ensure the Jog distance is set to a low value, like 5, to prevent potential collisions. If you’re unsure whether a joint is moving in the correct direction, enable the simulation and compare the joint’s movement in the simulation to the actual robot’s movement.
Home the robot
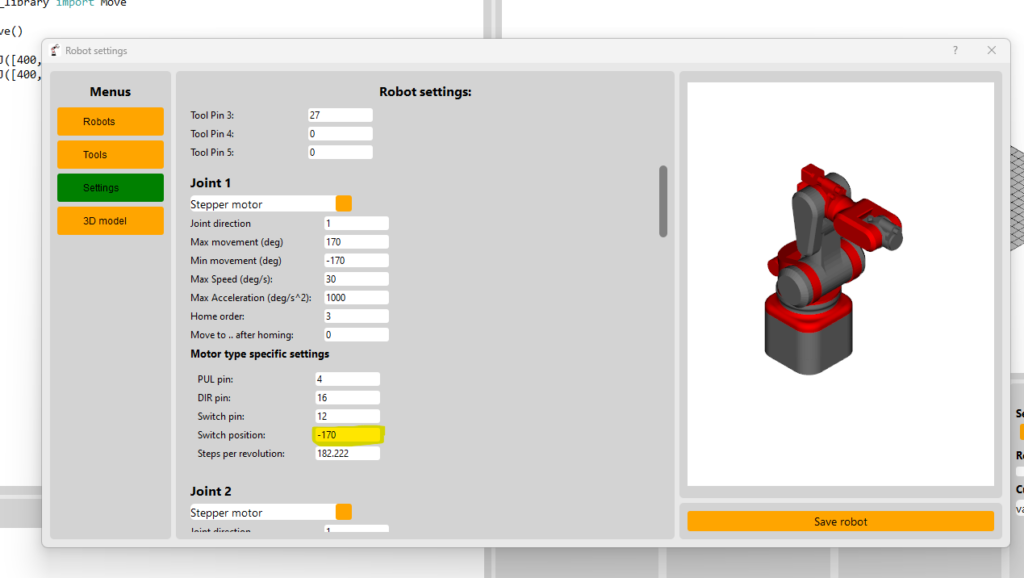
Modify the limit switch positions
Since the robot uses mechanical limit switches to determine its position, you may need to adjust the offset of the limit switches slightly. You can do this in the robot settings. This value defines the position of the limit switch relative to the joint’s zero position.
Connect IO (MiKo-1 + IO)
When you are using an IO module, a seperate microcontroller for IO connections and tools. You can also connect this microcontroller to the software the same way as you have connected the robot to the software.
Start programming
You are now able to start programming the robot arm, you can choose between the python IDE and blockly programming. See for more information about the commands this page help page https://mikobots.com/mikobots-studio/help/program-field/
