 Skip to content
Skip to content Robot settings
Robot name:
Change the name of the robot
Number of joints:
How many joints the robot has that can move. This also determines the type of kinematics that is used for the robot. At the moment the software supports three types of robots, a 3, 5, and 6 axis robot arm.
The type of robot does not only depends on the number of joint, more information will follow.
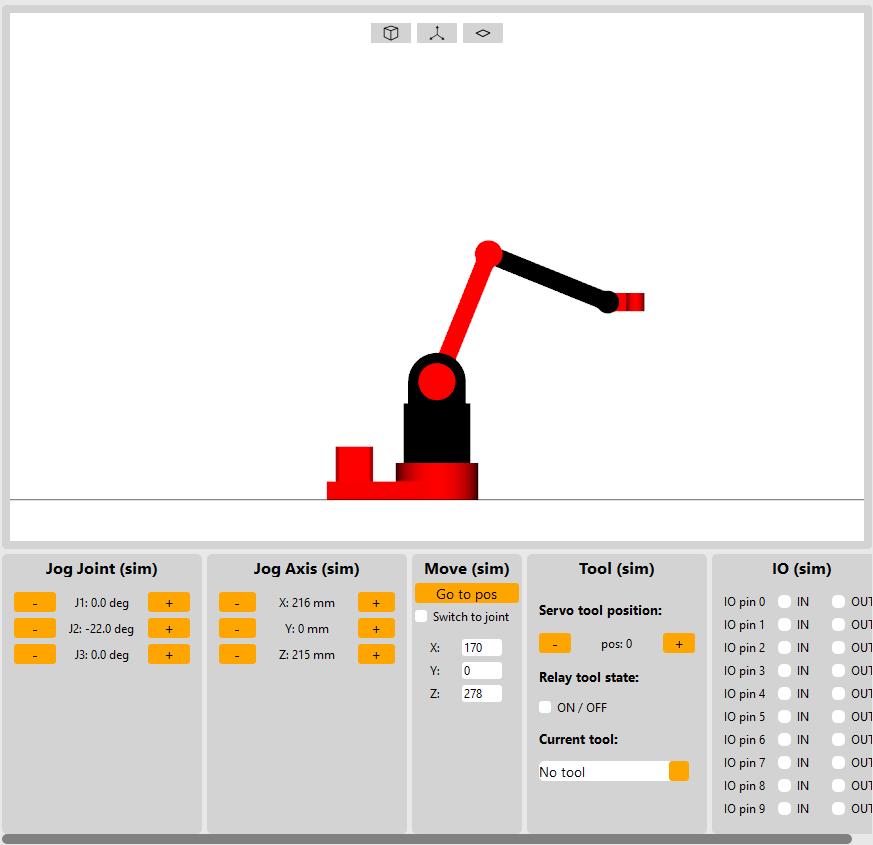
- Extra linkage: This applies for now only to a 3 axis robot arm where the tool always parrallel stays with the floor
IO pin
You can add 10 different IO pins to the software.
IO Checkbox: Next to the IO pin title there is a checkbox IO. When unchecked the tool pins are located at the same microcontroller as the robot pins. When checked it means that you are using a seperate microcontroller for the toolpin. This could be usefull if you are using multiple tool pins and the microcontroller has a limited amount of pins.
Tools pin
You can fill in 5 different Tool pins. For example “Tool pin 1” is a servo, and “Tool pin 2″is used for a relay. This relay could be connected to a magnet or vacuum pump. You can choose the right Tool pin for you specific tool in the tool settings.
IO Checkbox: Next to the Tool pin title there is a checkbox IO. When unchecked the tool pins are located at the same microcontroller as the robot pins. When checked it means that you are using a seperate microcontroller for the toolpin. This could be usefull if you are using multiple tool pins and the microcontroller has a limited amount of pins.
Joint settings
The settings for the joint joints are devided per joint
- Direction of the joint
Change the setting to 1 or 0 to set the joint’s default direction. If you’re unsure, check the simulation to see how the joint moves when using the jog buttons. The robot should turn the same way.
- Max/ min movement joints
- Max speed (deg/s)
This setting controls the joint’s maximum speed. It’s best to determine the value through testing start with a low number and gradually increase it.
- Max acceleration (deg/s)^2
Max acceleration is the highest acceleration a joint can handle, measured in (deg/s)². Higher acceleration requires more force to move the robot arm. For the first three joints, it’s best to use lower acceleration values.
- Homing order
- Move to .. after homing
This setting defines the position a joint moves to after being homed. Once all joints are homed, the robot moves them all the zero degrees. This setting is useful if moving directly to zero degrees after homing poses a collision risk.
Type of motor
You can choose between two types of motors for the joints a servo and stepper motor.
Stepper motor
- PUL pin
PUL pin the pin that is connected to the PUL of the stepper driver
- DIR pin
The pin that is connected to the DIR of the stepper driver
- Switch pin
The pin that is connected to the specific switch of the joint
- Position switch
- Step/deg
How many steps it takes before the stepper motor turns 1 degree
Servo
- Servo pin
The pin that is connected to the signal pin of the servo
- Pulse range min/ max
Digital sero’s have a certain pulse range most of times 500 – 2500, this is that range in where can be controlled. This can most of the times be found on the on the data sheet of the servo.
- Range deg
The servo range in degrees, most of the times 180 degrees or 270 degrees.
- Zero position servo
The position of the servo in degrees when the joint is in zero degree position
